|
Lezioni di Geometria Franco Ghione |
|
III.1 Somma di vettori geometrici
Dati due vettori geometrici u e v la loro somma
u+v si calcola nel seguente modo:
Notiamo che, dato A, la costruzione non è ambigua essendo unico, per la
proprietà 1 il segmento AB che rappresenta u e quindi il segmento BC che rappresenta
v.
È facile anche rendersi conto
che se si cambia posizione del punto A e si eseguono le operazioni che abbiamo descritte a partire da
un'altro punto A' dello spazio il risultato che otteniamo è un altro segmento orientato A'C' che risulta equipollente ad AC. 
Per convincersi di questo basterà dimostrare che il segmento orientato A'C' è uguale e parallelo ad AC, cioé che la figura AA'C'C è
un parallelogramma1. La costruzione precedente del vettore somma può esprimersi con la formula Osserviamo ancora che il risultato della somma, pur essendo costruito a partire da dei segmenti dipende solo dalla direzione, dal verso e dal modulo dei due vettori che essi rappresentano. La figura animata seguente permette di modificare la direzione, il verso ed il modulo di due vettori u e v e di calcolare automaticamente la loro somma u+v. Cambiando la posizione di A il risultato è sempre un segmento orientato equipollente ad AC.
È molto utile per fissare delle corrette immagini mentali modificare più volte la figura animata per rendersi ben conto di
come si possa sommare una direzione un verso e un modulo con un'altra direzione, un'altro verso e un'altro modulo. In particolare è
utile, usando la figura animata del testo
fare la somma di vettori con la stessa direzione e lo stesso verso, o con la stessa direzione e versi opposti o anche fare la somma
di due vettori uguali. dato che AB + BA = AA = 0.
La dimostrazione di queste proprietà non crea particolari problemi. Per dimostrare la proprietà associativa basta osservare che  (u + v) + w = (AB + BC) + CD = AC + CD = AD D'altro canto  u + (v + w) = AB + (BC + CD) = AB + BD = AD La proprietà commutativa ci riporta alla così detta regola del parallelogramma dalla quale probabilmente ha avuto origine, con Leonardo da Vinci, l'algebra dei vettori. 
Abbiamo infatti che AB + BC = AD + DC dato che, essendo AB equipollente a DC e AD equipollente a BC, la figura che
si ottiene è un parallelogramma la diagonale del quale rappresenta il vettore somma. 
III. 3 Prodotto di un vettore geometrico per uno scalare
La somma di n vettori uguali a v si indica con nv. Mentre la m'esima parte di v è quel vettore che ha la stessa direzione e verso di v ma lunghezza un m-esimo di quella di v. Tale vettore è denotato con (1/m)v. Se si somma n volte il vettore (1/m)v otteniamo il vettore (n/m)v che ha la stessa direzione, lo stesso verso di v ma il modulo (n/m) volte quello di v. Più in generale dato un numero reale a positivo o negativo e un vettore v è possibile definire un nuovo vettore denotato con av che si chiama il prodotto di v secondo lo scalare a o anche il multiplo di v secondo lo scalare a. Il nuovo vettore av ha la stessa direzione di v, lo stesso verso se a > 0, il verso opposto se a < 0 e il modulo uguale al modulo di v moltiplicato per il valore assoluto o modulo di a 2 . In una formula il modulo di av è |av| = |a||v| L'esistenza del vettore geometrico av è garantita dal così detto assioma di continuità3 che viene generalmente trattato in tutti i
suoi significati nei corsi di logica matematica.
È interessante notare come la moltiplicazione di un vettore geometrico per -1 ne cambi il verso lasciando
inalterata direzione e modulo. Ne segue che, se moltiplichiamo un dato vettore geometrico due volte per -1, otteniamo il vettore di partenza.
Dunque, in questo contesto geometrico, la regola dei segni si interpreta dicendo che cambiando due volte il verso di percorrenza di una retta
si ottiene il verso di partenza.
Il prodotto di un vettore geometrico per uno scalare ha alcune importanti proprietà algebriche che ci permettono di operare
coi vettori geometrici come si opera coi numeri nell'aritmetica elementare.
La prima proprietà deriva facilmente dalla definizione. Se a o b è nullo la cosa è ovvia, in caso contrario
abbiamo quattro casi possibili da analizzare uno a uno :
a>0 e b>0, a>0 e b<0, a<0 e b>0, a<0 e b<0. A titolo d'esempio trattiamo il caso a>0 e b<0. Il vettore bv ha la stessa direzione
di v, verso opposto (perché b è negativo) e modulo |b||v|. Il vettore a(bv) ha la stessa direzione
di bv, verso uguale a quello di bv (perch´ a è positivo) e modulo |a|(|b||v|)= |a||b||v|. D'altra parte
il vettore (ab)v
ha la stessa direzione di v, verso oposto (perché ab è negativo) e modulo uguale a |ab||v|. Poiché |ab| = |a||b|, la formula
risulta dimostratrata.  Fissiamo ora un'altro punto A' dello spazio e sia av=A'B' e
aw = B'C'. Il vettore av + aw sarà quindi rappresentato dal segmento A'C'. Poiché |av| = a|v| e |aw|=a|w|, essendo questi moduli le lunghezze dei segmenti A'B' e B'C',
abbiamo che
il rapporto tra AB : A'B' = BC : B'C' = a. Inoltre l'angolo ABC e l'angolo A'B'C' sono uguali. Infatti abbiamo che AB e A'B' sono paralleli avendo i
vettori geometrici AB = v e A'B' = av la stessa direzione e analogamente sono paralleli BC e B'C'. I triangoli ABC e A'B'C'
hanno un angolo uguale e i lati che comprendono quest'angolo nella medesima proporzione, ne segue
(
Euclide VI, 4) che i due triangoli sono simili e quindi
A'C' è parallelo ad AC, ha dunque la stessa direzione e lo stesso verso, inoltre la sua lunghezza è a volte quella di AC. Ne segue che
av + aw = a(v + w). au + bv + ... + cw Gli scalari a, b, ... , c sono detti coeffcienti della combinazione lineare. Con una immagine legata alla statica, scienza
dalla quale questi concetti hanno tratto origine, si dice anche che i vettori u, v, ... ,w sono stati presi con i
pesi a, b, ... , c e sommati tra loro.  Cliccando sulla figura si apre una pagina animata che aiuta ad esercitarsi sul calcolo di combinazioni lineari di
vettori. In fondo alla pagina sono proposti degli esercizi pratici da realizzare servendosi della figura animata.
Questa pratica aiuta a svolgere correttamente e con facilità gli esercizi che proponiamo in fondo a questa sezione. cioé La cosa interessante è che questo punto C è il centro di qualunque parallelogramma che abbia A1 e A2 come vertici opposti. Ricordiamo che in ogni parallelogramma le due diagonali si incontrano nel loro punto medio, ciò significa, in termini vettoriali, che per ogni punto R dello spazio 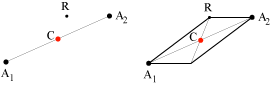
Questa relazione, che deriva dalle proprietà geometriche dei parallelogrammi, può essere dimostrata facilmente usando il calcolo vettoriale con le sue proprietà. Possiamo infatti scrivere, per ogni punto R dello spazio e quindi se C è il centro della configurazione cioé se CA1 + CA2 = 0 abbiamo, usando le proprietà che abbiamo visto e, in particolare l'esistenza dello zero e dell'opposto RA1 + RA2 + 2CR + (-2CR) = -2CR RA1 + RA2 + 0 = -2CR RA1 + RA2 = 2RC
Come possiamo definire il centro di una configurazione formata da tre punti? L'idea di costruire il cerchio che passa per questi tre punti e prendere come centro della configurazione il centro di questo cerchio, come qualche studente ha suggerito, non è buona. Infatti se il triangolo che ha come vertici questi punti fosse un triangolo rettangolo, allora il centro si troverebbe su un lato (l'ipotenusa) cosa che non torna con l'idea che abbiamo di centro; inoltre, questa proposta diventa impraticabile per 4 o più punti dato che, in generale, quattro punti non stanno su una stessa circonferenza.
Si tratta ora di fare due cose: la prima è dimostrare che tale punto esiste ed è unico, la secoda è dare un algoritmo per costruire effettivamente tale punto. Viceversa se esiste un punto C e un punto R tale che RA1 + RA2 + ... + RAn = nRC allora CA1 + CA2 + ... + CAn = 0. La dimostrazione si basa, come prima, sul fatto, alla base della definizione di somma tra vettori geometrici, che, comunque si scelga un punto R dello spazio, risulta
Supponiamo dunque che esista un punto C tale che CA1 + CA2 + ... + CAn = 0, usando la proprietà che abbiamo ricordato, questa identità di vettori implica che CA1 + CA2 + ... + CAn = (CR+RA1) + (CR+RA2) + ... + (CR+RAn) =nCR + RA1 + RA2 + ... + RAn. Ma questo vettore è il vettore nullo e quindi RA1 + RA2 + ... + RAn = -nCR= nRC. Il viceversa si dimostra usando lo stesso calcolo.  Dunque il centro C dei tre punti si trova costruendo il parallelogramma che ha come lati adiacenti i segmenti A1A2 e A1A3 e dividendo la diagonale in tre parti uguali come in figura.  Ma avremmo potuto scegliere come punto R il punto medio del segmento A1A3 o anche del segmento A3A2: il risultato, vista l'unicità del centro, sarebbe stato comunque lo stesso punto C. Da questo ricaviamo che le tre mediane di un triangolo si incontrano in un punto che divide ciascuna mediana nello stesso rapporto 1:2.
 La nozione di centro si può generalizzare al caso di n punti pesati. Un punto pesato è una coppia (A,p) dove A è un punto dello spazio e p un numero reale. Dati n punti pesati (A1,p1) , (A2,p2) ,..., (An,pn) il loro centro è un punto C tale che Gli argomenti e i calcoli che abbiamo fatto prima possono ora generalizzarsi a questa situazione. In particolare abbiamo che, se la somma dei pesi è non nulla, la condizione precedente vale se e solo se, per ogni punto R dello spazio risulta Quando la somma dei pesi è nulla Grassman azzarda l'idea che il centro si trovi all'infinito nella direzione del vettore a primo membro. questo punto è il baricentro della bilancia data dal peso p applicato in A e dal peso q applicato in B dato che, la relazione precedente implica che AC=(q/p)CB e quindi, passando ai moduli
che è appunto la relazione che individua il baricentro del sistema dato dai due pesi.
Usando questo fatto (vedi esercizio 9) Grasmmann poteva dimostrare che il centro di n punti pesati corrisponde al baricentro del sistema fisico dato da quei punti con quei pesi ottenendo, in questo modo, una prima importante applicazione fisica della sua nuova algebra dei vettori che permetteva il calcolo del baricentro in forma intrinseca senza usare coordinate e sistemi di riferimento.
| |