|
Lezioni di Geometria Franco Ghione |
|
Coordinate cartesiane Lo spazio euclideo tridimensionale si indica con E3: E sta per Euclide, 3 è la dimensione. L'insieme V dei suoi vettori è lo spazio vettoriale dei vettori geometrici. V è uno spazio vettoriale di dimensione 3 dotato di un prodotto scalare. Questi due insiemi sono legati da una relazione fondamentale: a due punti qualunque A e B di E3 è possibile associare in modo univoco un vettore di V: il vettore AB e questa corrispondenza verifica la relazione strutturale seguente: AB+BC=AC v = OA Queste proprietà valgono anche se ci restringiamo a piani o rette dello spazio. Precisamente una retta r da luogo anche all'insieme dei suoi vettori cioè dei vettori AB definiti da due punti di r. L'insieme di tali vettori è un sottospazio vettoriale di V di dimensione 1 che si chiama la direzione della retta r e che abbiamo indicato con Wr. Anche in questo caso, dato un qualunque vettore v di Wr e un punto O di r esiste un unico punto A di r tale che v = OA. Analogamente anche un piano a si porta dietro l'insieme dei suoi vettori. Tale insieme si chiama la giacitura di a ed è un sottospazio vettoriale di V di dimensione 2 che abbiamo indicato con Wa. Possiamo ora dare il concetto di sistema di riferimento cartesiano. Se r è una retta, un sistema di riferimento cartesiano per r è una coppia (O, i) dove O è un punto della retta, detto origine del sistema di riferimento, e i è un versore di Wr cioè una base ortonormale dello spazio dei vettori di r. Fissato un sistema di riferimento cartesiano su una retta r possiamo associare a ogni punto P di r un numero reale x detto ascissa di P nel riferimento (O,i). Il numero x è quel ben determinato numero che esprime il vettore OP di Wr come multiplo di i: OP = x i.
Il numero x si interpreta, essendo i un versore, come la distanza, con segno, di P da O. 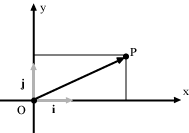 L'ascissa x rappresenta la distanza di P dall'asse delle ordinate e l'ordinata la distanza dall'asse delle ascisse.
e si scrive P = (x,y,z).  Se P' è la proiezione ortogonale di P sul piano orizzontale e se H e K sono le proiezioni ortogonali di P' sugli
assi x e y rispettivamente, allora e quindi le tre coordinate di P si interpretano come le lunghezze (con segno) dei segmenti Osserviamo che, essendo i, j, k una base ortonormale di V, le coordinate del punto P si ottengono moltiplicando scalarmente il vettore OP per i tre versori della base: Se A = (x1,y1,z1) e B = (x2,y2,z2) sono due generici punti dello spazio, la loro distanza è data dal modulo del vettore AB. Poiché AB =AO + OB = OB - OA e poiché, per come sono state definite le coordinate, OA = x1i + y1j + z1k e OB = x2i + y2j + z2k, abbiamo: |
| AB = (x2 -x1)i + (y2 - y1) j + (z2 - z1)k | (formula 1) |
|
(formula 2) |
|
| (x-x1)2 + (y-y1)2 + (z-z1)2 = r2 | (equazione della sfera) |
formano una sfera di centro C=(1,0,0) e raggio 2. Infatti completando il quadrato x2-2x troviamo (x - 1)2 + y2 + z2 = 4 Non è difficile, dati n punti dello spazio dei quali siano note le coordinate, calcolare quelle del loro centro. Abbiamo infatti che, se A1=(a1,b1, c1) , A2=(a2,b2, c2) , ... , An=(an,bn, cn) sono le coordinate degli n punti e se C=(x,y,z) è il centro della configurazione, allora, per definizione di Centro, ponendo R=O, e quindi, moltiplicando per i cioé analogamente moltiplicando per j e k. In definitiva abbiamo:
Esercizi |